
How does a Quadcopter work?
Hey friends, Happy Thursday!
Last week, I bought a mini drone and learned to fly and control it in my room just for fun and to understand its nuances.
Let’s explore and understand the basics of drone physics this week. I aim to write my newsletter issues in a way one can follow them while traveling on a bus, having a coffee, waiting for food, etc. Let's jump in!
How it works: 15-second answer
Quadcopter uses Newton’s third law “Every action has an equal and opposite reaction” as the basic principle of operation. It stays airborne and maneuvers by controlling the speed of its four rotors.
Two pairs of diagonally opposite rotors spinning in the same direction stabilize the quadcopter. Decreasing the speed of one pair of diagonally opposite rotors allows for clockwise or counterclockwise rotation (yaw motion). By varying the speed of rotors on each side, the quadcopter moves sideways without affecting altitude.
Answer to the question I posed last week
Last week, I asked what are some of the consumer electronics products that use mica sheets like the toaster.
Radio, TV sets, fans, microwaves, and kettles also use mica as they are really good electrical insulators.
How does a Quadcopter Fly?
In very simple terms, any flying robot is a drone. A quadcopter is a specific type of drone that has four rotors. I’ll call the rotors fans to make the reading experience more comfortable.
First things first. How do birds, planes, and helicopters fly and stay in the air?
They all use the same principle of Newton’s third law: Every action has an equal and opposite reaction.
They push the air in the environment downwards and in turn, the air applies an equal and opposite force to push them upwards. When this force is larger or equal to their weight, they can stay airborne. A bird flaps its wings quickly and repetitively pushing the air downwards, and the air pushes the bird upwards in response. Now that we understand the basic physics behind how things fly, let’s go to the next step of trying to build a drone.
Let’s build a drone with a single fan

Figure 1: A single fan drone undesirably spins the body in the opposite direction due to Newton’s third law
We can make the drone fly high into the skies successfully with Newton’s third law in action. But there are 2 major issues in this design.
Issue #1: There is no way to control the fan and make them move to their left, right, or any direction. They can only go up and come down. That is of mostly no use.
The speed, direction, and all the maneuvers you see a typical quadcopter perform are solely made possible by controlling the speed of the fans. That’s it. There is no other magical potion.
A simple definition before we proceed...
Torque is a twisting or turning force that tends to cause rotation around an axis.
Issue #2: Also, because the fan is spinning, it applies an equal torque in the opposite direction and makes the body of the quadcopter spin in the opposite direction as seen in the gif. So our drone is constantly spinning about its axis. But wait, isn’t a helicopter like a drone with a single fan? No! A helicopter has an additional small fan in its tail end to adjust for this undesirable rotation.
So what’s the solution?
Let’s try adding four fans to our drone.
By exploring the different motions we can perform and control once we have four fans on our drone, you’ll be able to appreciate why having four fans does the magic.
Motion Benefit #1: The quadcopter doesn’t spin about its axis “undesirably” like in the case of a drone with a single fan.
Let’s see how this is made possible using Figure 2. Notice that the diagonally opposite fans are commanded to rotate in the same direction (either clockwise or counterclockwise).
Figure 2: Drone with diagonally opposite fans rotating in a similar direction cancels the net torque on the body of the drone. Red (ClockWise). Blue (CounterClockWise)
So the net torque developed due to these four fans all cancel out and they can now fly upwards or descend downwards without spinning the body of the quadcopter.
If the speed of the fans is such that the upward force on the fans is equal to the total weight, then the quadcopter can hover in place.
We can increase the speed of the fans if we want to go higher and decrease them if we want to get lower.
Motion Benefit #2: Quadcopter can rotate in place (aka Yaw motion) by decreasing the speed of one pair of diagonally opposite fans.
Let’s say the quadcopter is hovering at a height in space, and we want it to face a different direction on its right (clockwise). This type of rotation about its vertical axis is also called a Yaw.

Figure 3: Yaw motion of a quadcopter
Here is what happens when the diagonally opposite blue fans (counterclockwise) in Figure 2 spin faster compared to the red fans (clockwise).
The blue fans are faster, so there is a net torque in the counterclockwise direction.
This means, due to Newton’s third law the body experiences an equal and opposite torque making the quadcopter rotate clockwise to its right. Which is what we want. Similarly, we can turn the quadcopter counterclockwise by slowing down the speed of the counterclockwise blue fans.
To summarize, if we want the quadcopter to rotate say clockwise, the fans spinning counterclockwise should be faster. Only then can Newton’s third law come into action and spin the quadcopter in the opposite direction, clockwise.
Motion Benefit #3: We can go forward, backward, and also sideways without any trouble.
Let’s say we want the quadcopter to move to its left. The quadcopter is facing us in the image below, so our right is its left.
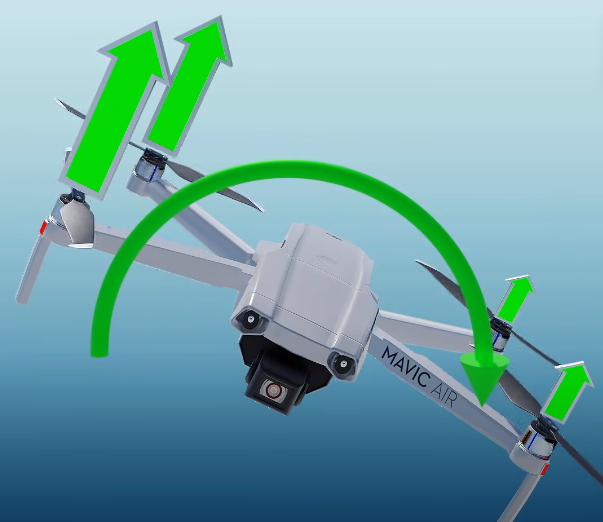
Figure 4: The quadcopter moves to its left by spinning the fans on the right faster. It is facing us, so our right direction is its left.
To make this happen, we increase the speed of both the fans on the right more than the ones on the left. Thus, the net force pushing the fans on the right upwards is more than the force experienced by the fans on the left.
This causes the quadcopter to rotate to the left (roll motion) due to torque. Now all four fans are inclined to the left.
So there is a component of the force on the fans pushing them to the left horizontally. The fan speeds are controlled through a computer and sensors such that the vertical component of the force balances out the weight so they don’t move up or down, but only to the left. Similarly, we can make the quadcopter move to the right by increasing the speed of the fans on the left, backward by increasing the speed of the fans in the front, and so on.
Thus, all our basic motions can be achieved by using four fans on our drone. This is the physics behind how a quadcopter works!
Question of the week
What are the advantages and disadvantages of having a drone with just three fans? Reply to this email with your thoughts, and we’ll discuss.
Gadget of the week
Zipline: Zipline is an autonomous fixed-wing drone company that uses drones to deliver medical supplies, particularly blood bags, to remote and hard-to-reach areas. These drones are equipped with GPS navigation systems, onboard computers, and parachutes for precision drops.
That’s all folks. Thank you for reading!
Have an amazing rest of the week, and take care!
Until next to next Wednesday,
Chendur